




有關更多信息,請訪問br-,您可能還喜歡:集成伺服電機為移動機器人應用提供設計優勢不要忘記選擇放大器時的這兩件事-什么時候需要線性放大器而不是PWM-貝加萊SafeDESIGNER3.1中的新功能包括擴展的數值范圍-提交如下:控制。
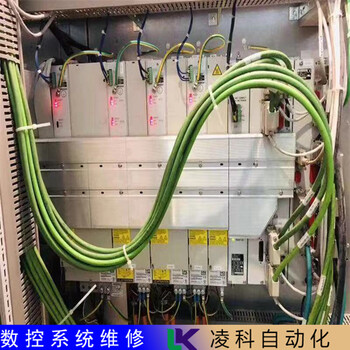
K0S-B凱恩帝KND數控系統維修技術常州凌科自動化不僅可以維修故障的數控系統,加工中心我們也是可以維修的,如馬扎克Mazak、DMGMORI德瑪吉、Okuma大隈、ZOJE中捷、牧野MAKINO、哈斯Haas等品牌的維修都可以隨時咨詢我們哦,我們提供一對一的技術咨詢維修服務。
Withthislaunch,themanufacturercanbettermeetcustomerdemandformotorandmotioncontrolsolutions,Inverters-alsocalledvariablefrequencydrives(VFDs)-optimizem。
在其他情況下,操作可能需要放慢速度以避免振動和共振。此類補救措施的問題在于它們會使機器尺寸膨脹、增加勞動力成本并損失能量。每個添加的組件都是以熱量形式耗散的額外能量。伺服鏈中的組件(負載、電機、驅動器)都會導致這些低效率。Elmo的方法認識到伺服驅動器在減少有效驅動負載所產生的總體污染方面起著主導作用從而消除了對伺服鏈補償組件的需要。這種方法提高了性能,降低了成本并縮短了上市,并有助于生產更環保的機器。這是哲學:如果你不產生熱量,就沒有必要消除它。如果你不產生噪音,就沒有必要消除它。使用智能控制消除需要修改機械。理想情況下,當命令伺服驅動器驅動負載時,驅動器通過向機械負載提供速度和扭矩來響應。
K0S-B凱恩帝KND數控系統維修技術
加工中心模塊損壞原因
1、過載或過熱:如果加工中心運行過程中承受了超過其設計能力的負載或者長時間工作導致過熱,模塊可能會損壞。
2、電力問題:不穩定的電源或電壓波動可能對加工中心模塊造成損害。例如,電力供應不足、過電壓、等問題都可能對模塊造成損壞。
3、零部件磨損:加工中心的模快中的零部件經過長時間的使用和磨損,可能會出現機械故障或部件失效,從而導致模塊損壞。
4、錯誤操作或人為因素:錯誤的操作、不當的維護以及人為疏忽等因素也可能導致加工中心模塊損壞。例如,錯誤的設定參數、使用不合適的刀具、碰撞或撞擊等都可能對模塊造成損壞。
5、操作不當:錯誤的使用、維護或保養加工中心模塊可能損壞模塊。生產環境問題:惡劣的生產環境,如濕度、灰塵、振動等可能對模塊造成負面影響。
這款緊湊型逆變器提供同類產品中的功率密度之一,可以直接安裝為機器模塊,而不會犧牲功率,與市場上的傳統系統相比,G120C所需的空間減少多達30%,功率密度提高多達40%,快速連接的插入式端子可加快安裝速度。
混合伺服電機:AppliedMotion推出支持EtherCAT的閉環步進系統AppliedMotion推出支持EtherCAT的閉環步進系統2016年11月29日MaryGannon本月早些時候在PackExpo發表,AppliedMotionProducts推出了其新的閉環步進系統,該系統將于具有EtherCAT功能。其用于工業以太網的StepServo閉環電機和驅動系統即將面世。據AppliedMotion營銷經理EricRice介紹,采用EtherCAT的StepServo“比傳統步進電機提供高達50%的扭矩,而功率卻降低了1/3消耗。它把步進電機的所有缺點都去掉了。”閉環系統非常適合包裝應用。
K0S-B凱恩帝KND數控系統維修技術
加工中心模塊損壞維修方法
1、故障診斷:,需要進行故障診斷,確定導致模塊損壞的具體原因。這可能需要使用測試設備、閱讀故障代碼或進行實際檢查來確定問題所在。
2、零部件更換:如果發現具體的組件或配件損壞,可能需要將其更換。這可能需要訂購并安裝新的零部件。確保使用與原始規格相匹配的零部件。
3、電源修復:如果電力問題是導致模塊損壞的原因,可能需要修復電源供應或更換電源設備。這可能包括更換電源線、使用穩壓設備或應用電源濾波器等。
4、固件更新:有些模塊損壞可能是由于固件問題引起的。在這種情況下,可以嘗試更新模塊的固件版本,以解決已知的問題和錯誤。
5、復位和校準:有時,執行復位操作或校準程序可以解決一些常見的模塊問題。按照維修人員的指示執行復位或校準過程。
5、技術支持:對于復雜的故障或需要知識的維修,建議尋求維修人員支持。他們可以提供更準確和具體的維修建議。
K0S-B凱恩帝KND數控系統維修技術
特的冷卻設計使客戶能夠快速運行鼓風機,從而提,鼓風機還采用了新的軸承保護設計,以提高鼓風機的使用壽命,由于冷卻系統的重新設計,它還具有降低的聲級,來自制造商:目前,我們有幾個單位發送給客戶。 無論哪種方式,單相應用中的驅動器都過大,以承受增加的總線電壓紋波和增加的輸入電流,如果您的真正意圖是確保驅動器在其之前[購買農場",那么不要在單相應用中為電機提供超大驅動器,,,,,,并等待連續故障和終驅動器故障。
可以使電機轉動一整步,這種操作方法意味著驅動器能夠連續輸出小脈沖電流,制造商已經創建了多種方法來執行此操作,因此請務必查看文檔以了解相關驅動器使用哪種方法,請注意,變量-磁阻步進電機不能用微步進驅動。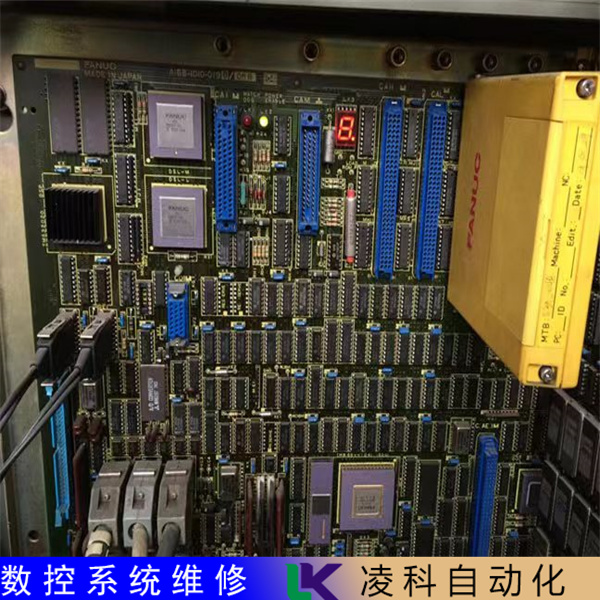
我們了解精度的重要性。無論是將伺服驅動器用于軍事、機器人、汽車、還是其他應用,我們的伺服驅動器都是為執行而設計的!作為堅固的伺服驅動器的者,ESIMotion的Atom是我們新的雙軸模塊,旨在在不犧牲任何功率的情況下在小型應用中運行。Atom伺服驅動模塊的用途雙軸Atom重量超輕且結構緊湊(不超過四分之一),可針對尺寸至關重要的各種應用進行配置。選項包括輸入電壓、輸出電流幅度以及反饋設備和雙軸或行軸配置、寬溫度范圍等功能,等等,這種堅固的伺服驅動器的應用似乎無窮無盡。我們的伺服驅動模塊是在我們位于美國加利福尼亞州的行業工廠設計和制造的,符合各種和行業標準。憑借其堅固、經過現場測試的控制器和基于半導體的寬帶隙功率驅動器。
以及NORD專有的AUTOVENT壓力調節技術,這款單級齒輪裝置適用于泵送和混合應用,食品加工以及使用腐蝕性化學品的任何地方,頂置精度:需要可靠,易于保持清潔且非常經濟實惠的高架輸送機,SK9055和SK9155齒輪驅動輸送機采用防漏。
常見問題解答:如何調整伺服系統以實現高動態響應?2016年6月21日,丹妮爾·柯林斯(DanielleCollins)伺服控制回路的目的是小化誤差,這通常是通過使用PID(比例-積分-微分)增益來實現的,它可以糾正目標值和實際值之間的誤差。但是PID算法是反應性的,需要來響應。恰當的例子:比例項需要誤差才能生成輸出,而積分項既需要誤差又需要。此外,并非總能將PID增益增加到導致可接受誤差的水,同時又不會導致系統不穩定。解決PID增益的反應性及其在高電時引起振蕩的傾向的一種解決方案是使用前饋增益。在PID控制中,比例項乘以任何時刻目標值與實際值之間的誤差并生成對個段輸出的比例貢獻。因此,比例項僅在出現誤差時才有用。
K0S-B凱恩帝KND數控系統維修技術
則只需產生電機產生10_Nm所需的連續RMS電流(如果伺服電機的Kt=1_Nm/Arms,則約為10_Arms)。我們可以通過確定連續額定值下的功率損耗能力來證明這一點--如圖A所示。然后我們將功率耗散能力與電流為的三相電機線圈的兩個壞情況換向點進行比較,50%,50%(FigureB)and86.6%,86.6%,0%(FigureC).給定電機信息:Tc(stall)=10_NmIc(stall)=10_ArmsKt=1.0_Nm/ArmsRm(LL)_25°C=1.006_ohms,其中Rm(LL)_150°C=(1.006_ohmsx1.491);和Rm?_150°C=1.5/2=0.75_ohmsTemp(連續運行的終繞組溫度)=150°CTemp-Rise(從25°C環境開始的大值)=150°C–;
Unitronics`softwareenablestheusertorapidlysetup,configure,andmissionmultipleVFDs,aswellastomonitoranddebugthe驅動器viaonlinewatchorScopeTracegraph。 幅值和頻率可調,輸出電壓波形由六個步驟組成,以類似于CSI驅動器的梯形輸出的方式,這種六步波形使轉子在定子中搜索個磁場,從而產生電機軸的急動運動,來自VSI驅動器的輸出電壓波形由六個步驟組成,圖片:what-when-PWM驅動器產生可變幅度和頻率的電壓。
p8hgwyt278g

威綸通WEINVIEW工控屏維修零時發布
533元
產品名:觸摸屏維修,工業觸摸屏維修,人機界面維修,工控屏維修

EA7-S6C-RS光洋KOYO觸摸屏維修信息探究
533元
產品名:觸摸屏維修,工業觸摸屏維修,人機界面維修,工控屏維修

BEIJERHMI觸摸屏維修服務態度好
533元
產品名:觸摸屏維修,工業觸摸屏維修,人機界面維修,工控屏維修

Mitsubishi觸摸屏維修公司規模大
533元
產品名:觸摸屏維修,工業觸摸屏維修,人機界面維修,工控屏維修

KND凱恩帝數控系統模塊損壞維修位控環報警維修放心省心
358元
產品名:西門子數控系統維修,發那科數控系統維修,三菱數控系統維修,安川伺數控系統維修

HCN-6000馬扎克MAZAK數控系統維修修復方法
358元
產品名:西門子數控系統維修,發那科數控系統維修,三菱數控系統維修,安川伺數控系統維修
LS187海德漢HEIDENHAIN直線光柵尺維修可靠放心
358元
產品名:西門子數控系統維修,發那科數控系統維修,三菱數控系統維修,安川伺數控系統維修

K2000MC凱恩帝KND數控系統維修修復方法
358元
產品名:西門子數控系統維修,發那科數控系統維修,三菱數控系統維修,安川伺數控系統維修